Geometric Algorithms
These algorithms are designed to solve Geometric Problems. They requires in-depth knowledge of different mathematical subjects like combinatorics, topology, algebra, differential geometry etc.
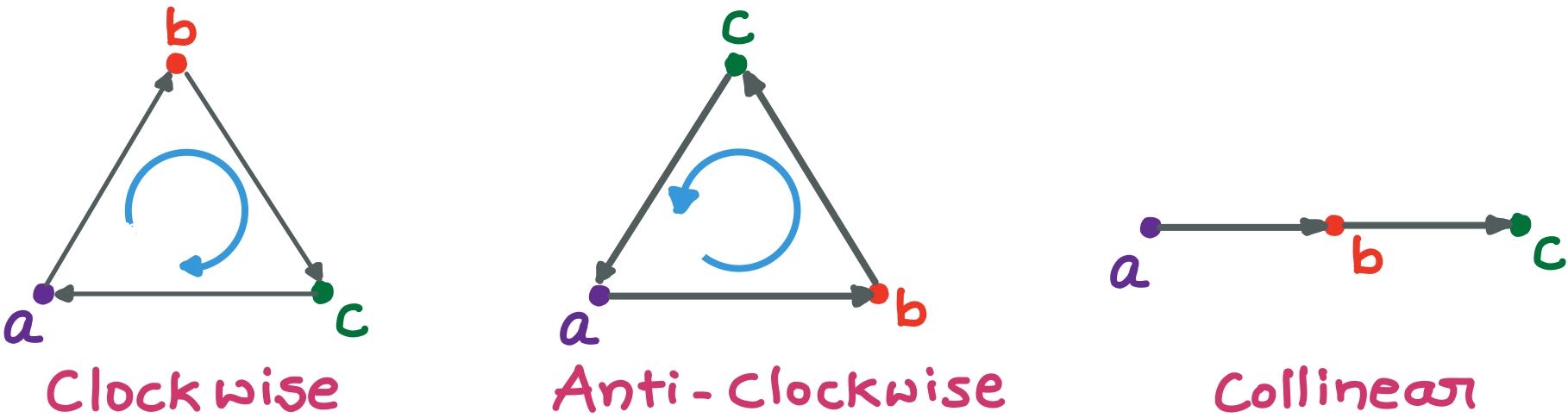
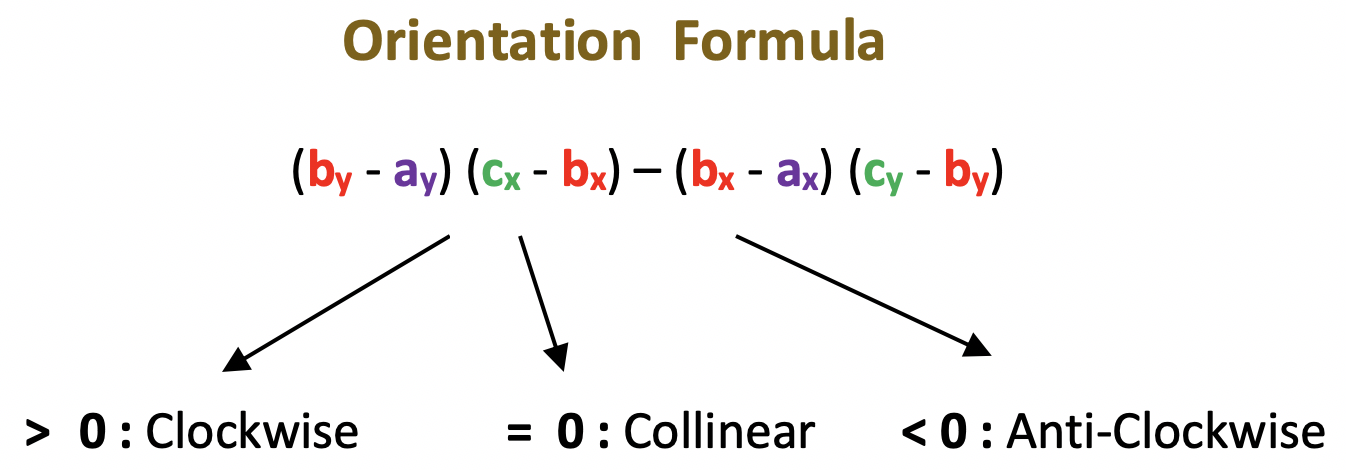
Concept of Orientation
Orientation of an ordered triplet of points in the plane can be:
- Clockwise
- Anti-clockwise
- Collinear
Standard Geometric Algorithm Problems
1. Check if 2 line segements intersect***
Problem:
Given two line segments (p1, q1) and (p2, q2), find if the given line segments intersect with each other.
Examples:
Input: Line-1: p1 = {1, 1}, q1 = {10, 1} Line-2: p1 = {1, 2}, q1 = {10, 2}
Output: No
Input: Line-1: p1 = {10, 0}, q1 = {0, 10} Line-2: p1 = {0, 0}, q1 = {10, 10}
Output: Yes
Input: Line-1: p1 = {-5, -5}, q1 = {0, 0} Line-2: p1 = {1, 1}, q1 = {10, 10}
Output: No
Intersection of 2 line segments
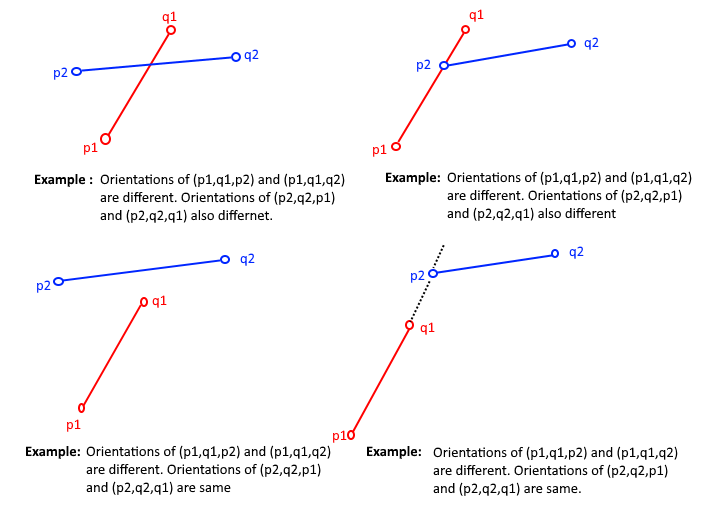
Two segments (p1,q1) and (p2,q2) intersect if and only if one of the following two conditions is verified:
Case-1: General Case
- (p1, q1, p2) and (p1, q1, q2) have different orientations and
- (p2, q2, p1) and (p2, q2, q1) have different orientations.
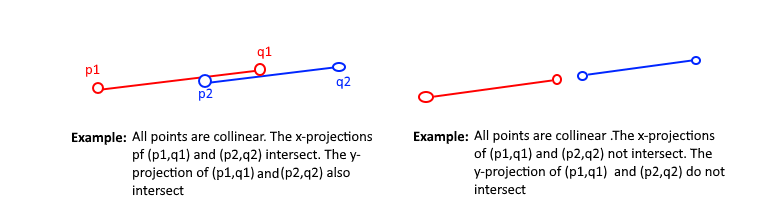
Case-2: Special Case
- (p1, q1, p2), (p1, q1, q2), (p2, q2, p1), and (p2, q2, q1) are all collinear and
- the x-projections of (p1, q1) and (p2, q2) intersect
- the y-projections of (p1, q1) and (p2, q2) intersect
Implementation:
def orientation(a, b, c):
val = (b[1]-a[1])*(c[0]-b[0]) - (b[0]-a[0])*(c[1]-b[1])
if val == 0:
return 0
elif val > 0:
return 1
else:
return -1
def on_segment(a, b, c):
if (b[0] <= max(a[0], c[0]) and b[0] >= min(a[0], c[0]) and
b[1] <= max(a[1], c[1]) and b[1] >= min(a[1], c[1])):
return True
return False
def check_2_line_segments_intersection(line1, line2):
p1 = line1[0]; q1 = line1[1]
p2 = line2[0]; q2 = line2[1]
# All 4 different orientation
# • p1, q1, p2 = o1 and p1, q1, q2 = o2 --> Should be different
# • p2, q2, p1 = o3 and p2, q2, q1 = o4 --> Should be different
o1 = orientation(p1, q1, p2)
o2 = orientation(p1, q1, q2)
o3 = orientation(p2, q2, p1)
o4 = orientation(p2, q2, q1)
result = False
### General Case
if o1 != o2 and o3 != o4:
result = True
### Case-2: Special Cases
# p1, q1 and p2 are collinear and p2 lies on segment p1q1
if o1 == 0 and on_segment(p1, p2, q1):
result = True
# p1, q1 and q2 are collinear and q2 lies on segment p1q1
if o2 == 0 and on_segment(p1, q2, q1):
result = True
# p2, q2 and p1 are collinear and p1 lies on segment p2q2
if o3 == 0 and on_segment(p2, p1, q2):
result = True
# p2, q2 and q1 are collinear and q1 lies on segment p2q2
if o4 == 0 and on_segment(p2, q1, q2):
result = True
if(result):
print("Yes")
else:
print("No")
print("Example-1: check_2_line_segments_intersection([(1,1), (10,1)], [(1,2), (10,2)])")
check_2_line_segments_intersection([(1,1), (10,1)], [(1,2), (10,2)])
print("\nExample-2: check_2_line_segments_intersection([(10,0), (0,10)], [(0,0), (10,10)])")
check_2_line_segments_intersection([(10,0), (0,10)], [(0,0), (10,10)])
print("\nExample-3: check_2_line_segments_intersection([(-5,-5), (0,0)], [(1,1), (10,10)])")
check_2_line_segments_intersection([(-5,-5), (0,0)], [(1,1), (10,10)])
Output:

Complexity:
- Time: O(1)
- Auxilliary Space: O(1)
2. Check if Point lies inside triangle
Problem:
Given three corner points of a triangle, and one more point P. Check if the p lies inside the triangle.
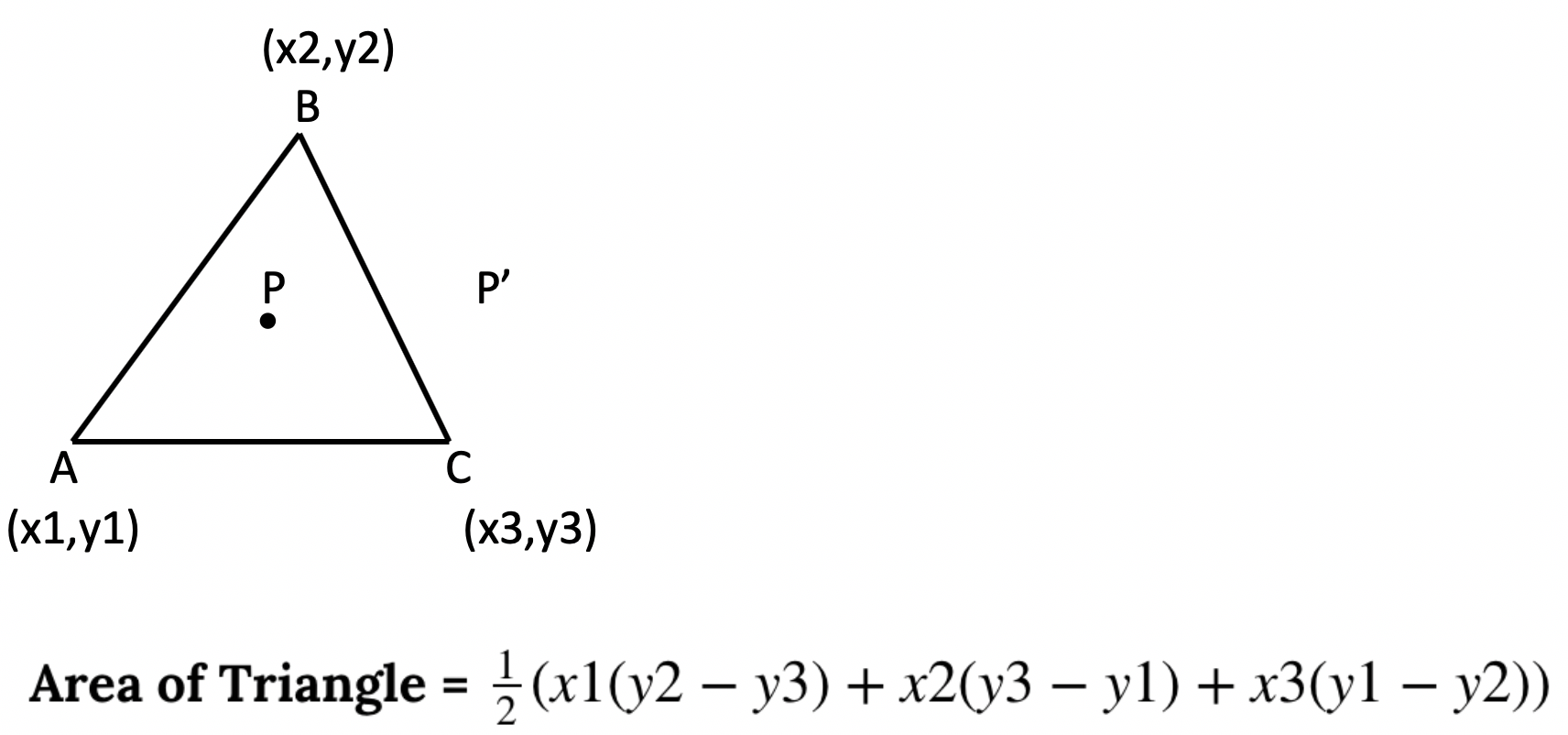
Approach: Simple
- Get the area of ∆ABC and check if it equals ∆PAB + ∆PAC + ∆PBC.
- If they equal then point P lies inside the triangle.
Implementation:
def triangle_area(x1, y1, x2, y2, x3, y3):
return abs(0.5*(x1*(y2-y3) + x2*(y3-y1)+ x3*(y1-y2)))
def point_lies_inside_triangle(x1, y1, x2, y2, x3, y3, x, y):
# Calculate Areas
area_ABC = triangle_area(x1, y1, x2, y2, x3, y3)
area_PAB = triangle_area(x, y, x1, y1, x2, y2)
area_PAC = triangle_area(x, y, x1, y1, x3, y3)
area_PBC = triangle_area(x, y, x2, y2, x3, y3)
if(area_ABC == area_PAB + area_PAC + area_PBC):
print("Inside")
else:
print("Outside")
print("Example-1: point_lies_inside_triangle(0, 0, 10, 30, 20, 0, 10, 15)")
point_lies_inside_triangle(0, 0, 10, 30, 20, 0, 10, 15)
print("\nExample-2: point_lies_inside_triangle(0, 0, 10, 30, 20, 0, 18, 25)")
point_lies_inside_triangle(0, 0, 10, 30, 20, 0, 15, 25)
Output:

Complexity:
- Time: O(1)
- Auxilliary Space: O(1)
3. Check if 4 Points form Square***
Problem:
Given coordinates of four points in a plane, find if the four points form a square or not.
Approach:
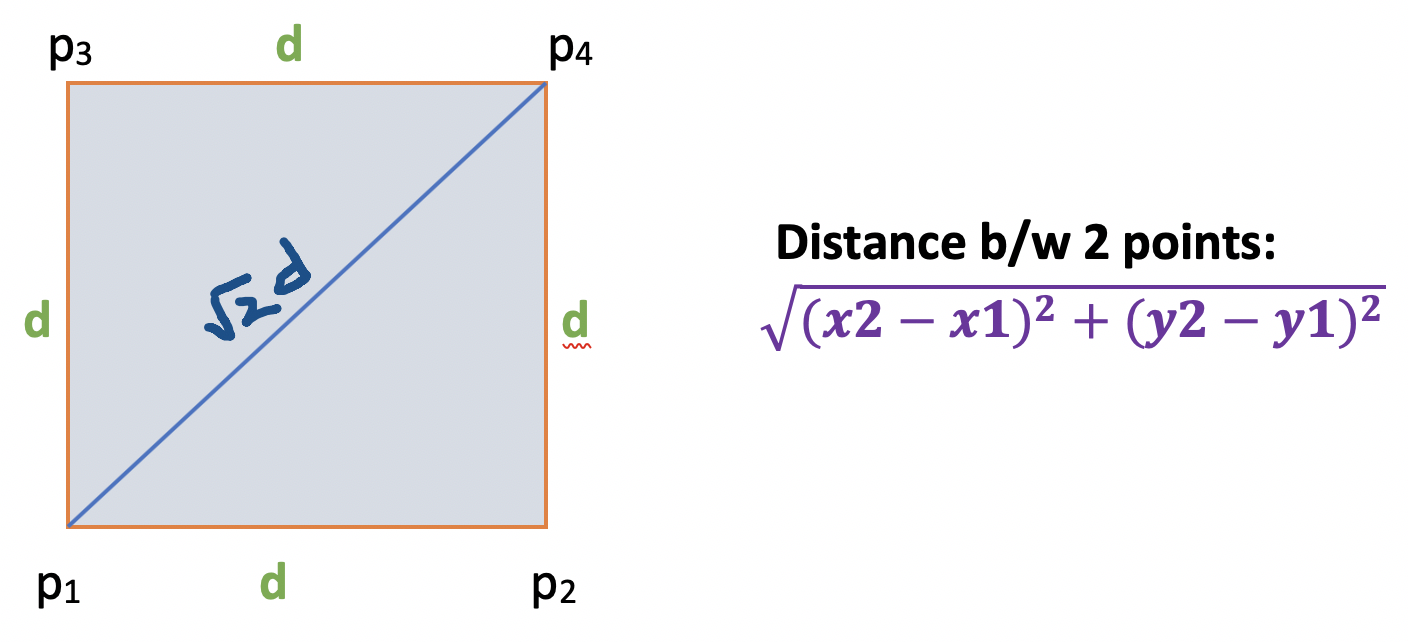
- Pick any point and calculate its distance from the rest of the points. Let the picked point be ‘p’.
- To form a square, the distance of two points must be the same from ‘p’, let this distance be d.
- The distance from third point must be equal to √2d. Let this point with different distance be ‘q’.
- The above condition is not good enough as the point with different distance can be on the other side.
- Check that q is at the same distance from 2 other points and this distance is the same as d.
Implementation:
def square_distance(a, b):
return (b[0]-a[0])*(b[0]-a[0]) + (b[1]-a[1])*(b[1]-a[1])
def check_square(p1, p2, p3, p4):
is_square = False
## Calculate distances from p1
d2 = square_distance(p1, p2) # from p1 to p2
d3 = square_distance(p1, p3) # from p1 to p3
d4 = square_distance(p1, p4) # from p1 to p4
# If lengths of (p1, p2) and (p1, p3) are same, then following conditions must meet to form a square:
# • 1) Square of length of (p1, p4) is same as twice the square of (p1, p2)
# • 2) Square of length of (p2, p3) is same as twice the square of (p2, p4)
if (d2 == d3 and 2*d2 == d4 and 2*square_distance(p2, p4) == square_distance(p2, p3)):
is_square = True
# Cases similar to above case
if (d3 == d4 and 2*d3 == d2 and 2*square_distance(p3, p2) == square_distance(p3, p4)):
is_square = True
if (d2 == d4 and 2*d2 == d3 and 2*square_distance(p2, p3) == square_distance(p2, p4)):
is_square = True
if(is_square):
print("Square")
else:
print("Not Square")
print("Example-1: check_square((20, 10), (10, 20), (20, 20), (10, 10))")
check_square((20, 10), (10, 20), (20, 20), (10, 10))
print("\nExample-2: check_square((20, 10), (10, 20), (20, 20), (10, 20))")
check_square((20, 10), (10, 20), (20, 20), (10, 20))
Output:

Complexity:
- Time: O(1)
- Auxilliary Space: O(1)
4. Check if Point lies inside Polygon***
Problem:
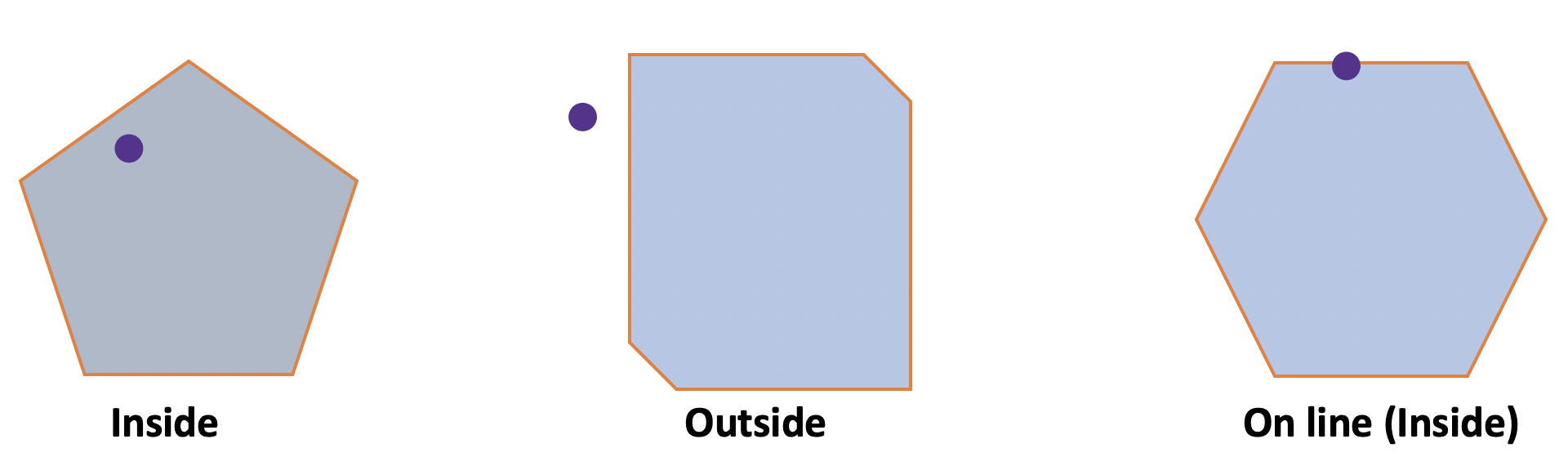
Given a polygon and a point p, check if p lies inside the polygon or not.
The points lying on the border are considered inside.
Approach:
- Draw a horizontal line to the right of each point and extend it to infinity.
- Count the number of times the line intersects with polygon edges.
- A point is inside the polygon if either count of intersections is odd or point lies on an edge of polygon.
- If none of the conditions is true, then point lies outside.
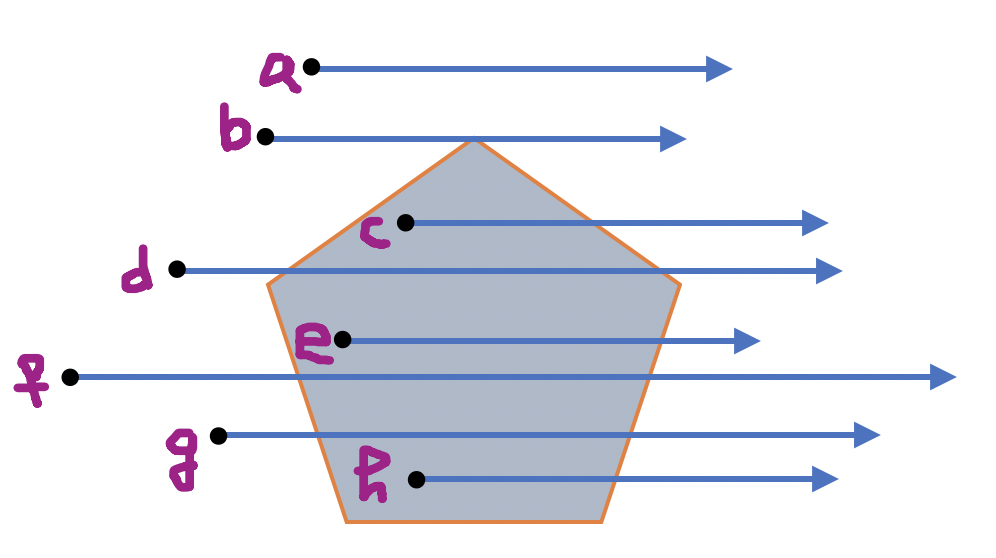
Handling cases such as of point b
- Note: We need to return true if the point lies on the line or same as one of the vertices of the given polygon.
- To handle this, after checking if the line from ‘p’ to extreme intersects:
- Check whether ‘p’ is collinear with vertices of current line of polygon.
- If it is collinear, then we check if the point ‘p’ lies on current side of polygon, if it lies, we return true, else false.
Implementation:
import sys
def orientation(a, b, c):
val = (b[1]-a[1])*(c[0]-b[0]) - (b[0]-a[0])*(c[1]-b[1])
if val == 0:
return 0
elif val > 0:
return 1
else:
return -1
def on_segment(a, b, c):
if (b[0] <= max(a[0], c[0]) and b[0] >= min(a[0], c[0]) and
b[1] <= max(a[1], c[1]) and b[1] >= min(a[1], c[1])):
return True
return False
def check_2_line_segments_intersection(line1, line2):
p1 = line1[0]; q1 = line1[1]
p2 = line2[0]; q2 = line2[1]
# All 4 different orientation
# • p1, q1, p2 = o1 and p1, q1, q2 = o2 --> Should be different
# • p2, q2, p1 = o3 and p2, q2, q1 = o4 --> Should be different
o1 = orientation(p1, q1, p2)
o2 = orientation(p1, q1, q2)
o3 = orientation(p2, q2, p1)
o4 = orientation(p2, q2, q1)
result = False
### General Case
if o1 != o2 and o3 != o4:
result = True
### Case-2: Special Cases
# p1, q1 and p2 are collinear and p2 lies on segment p1q1
if o1 == 0 and on_segment(p1, p2, q1):
result = True
# p1, q1 and q2 are collinear and q2 lies on segment p1q1
if o2 == 0 and on_segment(p1, q2, q1):
result = True
# p2, q2 and p1 are collinear and p1 lies on segment p2q2
if o3 == 0 and on_segment(p2, p1, q2):
result = True
# p2, q2 and q1 are collinear and q1 lies on segment p2q2
if o4 == 0 and on_segment(p2, q1, q2):
result = True
return result
def check_point_inside_polygon(polygon, p):
n = len(polygon)
# Not a polynomial
if n < 3:
print("Outside")
return
# Extreme point will have x as "infinity" and y same as point p
extreme = (sys.maxsize, p[1])
# Count for counting intersections
count = 0
result = False
for i in range(n):
current_vertex = polygon[i]
next_vertex = polygon[(i+1)%n]
# Check if the line segment from 'p' to 'extreme' intersects
# with the line segment polygon's current_vertex to next_vertex
if check_2_line_segments_intersection((current_vertex,next_vertex), (p,extreme)):
# If the point 'p' is collinear with line segment current_vertex---next_vertex
# Check if it lies on segment return true if it lies, otherwise false
if (orientation(current_vertex, p, next_vertex) == 0) :
result = on_segment(current_vertex, p, next_vertex)
count = 0
break
count += 1
if(result or count%2 == 1):
print("Inside")
else:
print("Outside")
polygon1 = [(0, 0), (10, 0), (10, 10), (0, 10)]
polygon2 = [(0, 0), (5, 5), (5, 0)]
print("Example-1: check_point_inside_polygon(polygon1, (20, 20))")
check_point_inside_polygon(polygon1, (20, 20))
print("\nExample-2: check_point_inside_polygon(polygon1, (5, 5))")
check_point_inside_polygon(polygon1, (5, 5))
print("\nExample-3: check_point_inside_polygon(polygon1, (-1, 10))")
check_point_inside_polygon(polygon1, (-1, 10))
print("\nExample-4: check_point_inside_polygon(polygon2, (3, 3))")
check_point_inside_polygon(polygon2, (3, 3))
print("\nExample-5: check_point_inside_polygon(polygon2, (5, 1))")
check_point_inside_polygon(polygon2, (5, 1))
print("\nExample-6: check_point_inside_polygon(polygon2, (8, 1))")
check_point_inside_polygon(polygon2, (8, 1))
Output:
Complexity:
- Time: O(n) : Size of polygon is n.
- Auxilliary Space: O(1)
← Previous: Mathematical Algorithms